Tiesitkö että...
Servomoottoreita käytetään esimerkiksi automaattisesti aukeavissa ovissa, kameran tarkentamismekaniikassa ja liukuhihnoissa.
Olet nyt tutustunut kattavasti luoviin ideoihin ja tekniikoihin, joilla Arduino ohjelmoidaan ja saadaan toimimaan vuorovaikutuksessa maailman kanssa. Tähän asti rakennelmista on kuitenkin puuttunut liike. Seuraavaksi tutustutaan moottoreiden ohjaamiseen Arduinolla sekä rakennetaan robotti.
Helppo tapa saada liikettä aikaiseksi Arduinolla on käyttää servomoottoria. Servomoottorissa on pieni DC-moottori, vaihteisto sekä ohjauselektroniikkaa.
Mehackit Maker Kitissäsi saattaa olla myös vaihdemoottoreita ja tavallinen sähkömoottori eli DC-moottori. Näitä ohjataan ulkoisella mikrosirulla, jota sanotaan usein h-bridgeksi.
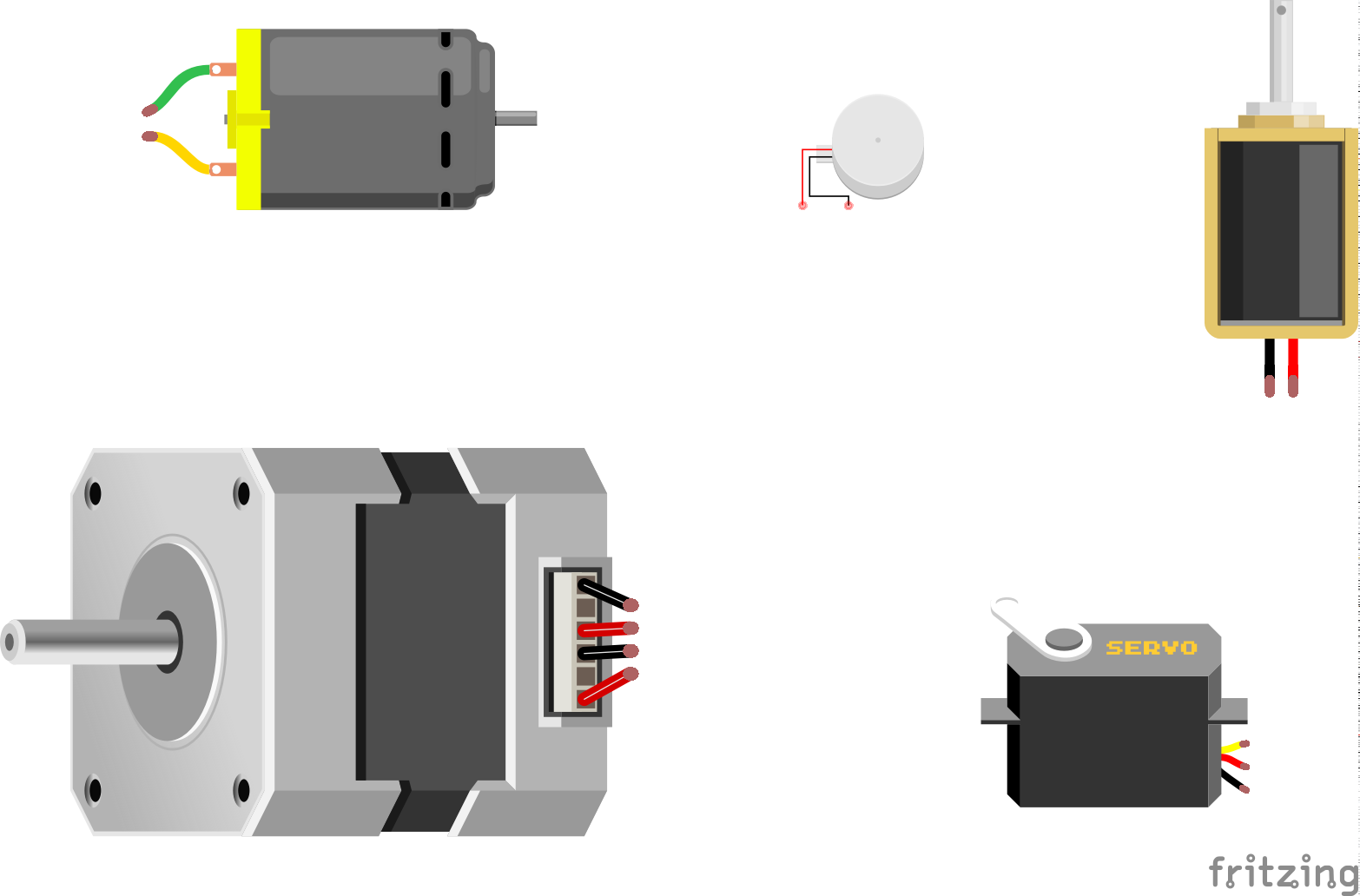
Kuva: Erilaisia Arduinon kanssa toimivia sähkömoottoreita (ylhäältä alavasemmalle: DC-moottori, värinämoottori, solenoidi, askelmoottori, servo)
Moottorit on varsin helppo saada ohjelmoitua pyörimään, mutta pelkkä pyörimisliike ei aina ole projekteissa riittävää. Pyörimisen voi muuttaa muiksi liikeradoiksi erilaisten mekanismien avulla. Yksinkertaisia mekanismeja voi rakennella kotitarpeista ja inspiraatiota kannattaa etsiä netistä!
Mehackit Maker Kitin muovilevyjä, pultteja ja muttereita kannattaa hyödyntää rakennelmissa - niistä saa aikaiseksi muutakin kuin seuraavassa tehtävässä rakennettavan, pyörillä ajelevan robotin.